三相交流モーターの損失は銅損、アルミ損、鉄損、漂遊損、風損に分けられます。最初の 4 つは加熱損失であり、合計は総加熱損失と呼ばれます。電力が小電力から大電力に変化したときの全熱損失に占める銅損、アルミ損、鉄損、浮遊損の割合を求めます。この例を通して、熱損失全体に占める銅の消費量とアルミニウムの消費量の割合は変動しますが、概ね大きい方から小さい方へと減少し、減少傾向を示しています。逆に、鉄損や漂遊損は、ばらつきはあるものの、概ね小さいものから大きいものへと増加し、増加傾向を示しています。電力が十分に大きい場合、鉄損浮遊損失が銅損を上回ります。場合によっては漂遊損失が銅損や鉄損を上回り、熱損失の第一要因となります。Y2 モーターを再解析し、総損失に対するさまざまな損失の比例変化を観察すると、同様の法則が明らかになります。上記の規則を認識すると、パワーモーターが異なれば、温度上昇と熱損失の低減に重点を置く点が異なると結論付けられます。小型モーターの場合、まず銅損を低減する必要があります。中出力および高出力モーターの場合、鉄損は漂遊損失の削減に重点を置く必要があります。「漂遊損失は銅損や鉄損に比べてはるかに小さい」という見方は一面的です。モータ出力が大きくなるほど、浮遊損失の低減に一層の注意を払う必要があることが特に強調されます。中容量および大容量のモーターは、高調波磁気ポテンシャルと浮遊損失を低減するために正弦波巻線を使用しており、その効果は多くの場合非常に優れています。漂遊損失を低減するためのさまざまな手段は、通常、有効な材料を増やす必要はありません。
導入
三相交流モータの損失は銅損PCu、アルミ損PAl、鉄損PFe、漂遊損Ps、風損Pfwに分けられ、最初の4つは加熱損失で、その合計を総加熱損失PQといいます。漂遊損失のうち、銅損PCu、アルミ損PAl、鉄損PFe、風損Pfwを除くすべての損失の原因であり、高調波磁気ポテンシャル、漏洩磁界、シュートの横電流などを含みます。
漂遊損失の計算の難しさとテストの複雑さのため、多くの国では漂遊損失をモータの入力電力の 0.5% として計算することを規定しており、これにより矛盾が単純化されています。ただし、この値は非常に大まかであり、設計やプロセスが異なると大きく異なることが多く、これも矛盾を隠し、モーターの実際の動作条件を正確に反映することはできません。最近、浮遊損失の測定がますます一般的になってきています。世界的な経済統合の時代においては、国際標準とどのように統合するかについて、ある程度前向きな考え方を持つことが一般的な傾向です。
本稿では三相交流モータについて検討した。電力が小から大に変化すると、総熱損失PQに占める銅損PCu、アルミ損PAl、鉄損PFe、漂遊損Psの割合が変化し、対策が得られます。より合理的でより良いものを設計、製造します。
1. モーターの損失解析
1.1 まずインスタンスを観察します。工場は電気モーターの E シリーズ製品を輸出しており、技術条件により漂遊損失の測定値が規定されています。比較しやすいように、まず出力範囲が 0.75kW ~ 315kW の 2 極モーターを見てみましょう。試験結果から、図1に示すように、総熱損失PQに対する銅損PCu、アルミニウム損PAl、鉄損PFe、漂遊損失Psの割合を計算します。図の縦軸は全加熱損失に対する各種加熱損失の割合(%)、横軸はモータ出力(kW)、菱形破線は銅消費量の割合、四角破線は銅消費量の割合を示します。三角の破線が鉄損率、×の破線が漂遊損失の割合です。
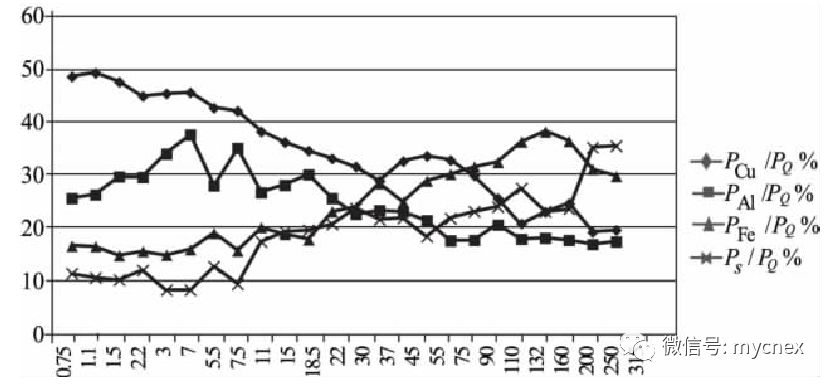
図 1. E シリーズ 2 極モーターの銅消費量、アルミニウム消費量、鉄消費量、浮遊損失、および総発熱損失の割合を示す折れ線グラフ
(1) モータの出力が小から大に変化すると、銅の消費割合は変動しますが、一般的には大から小へと変化し、減少傾向を示します。0.75kWと1.1kWが約50%を占め、250kWと315kWはそれ以下となっている。20%のアルミ消費量の割合も大から小へと推移しており、全体的には減少傾向にあるが、大きな変化ではない。
(2) モータ出力が小さいものから大きいものまで、鉄損の割合は変化しますが、多少の変動はありますが、一般に小さいものから大きいものへと鉄損の割合が増加し、増加傾向を示します。0.75kW~2.2kWでは約15%、90kWを超えると30%を超え、銅の消費量を上回ります。
(3) 漂遊損失の比例変化は、変動はあるものの、概ね小さい値から大きい値へと増加し、増加傾向を示します。0.75kW~1.5kWは約10%、110kWは銅の消費量に近い。132kW を超える仕様では、浮遊損失のほとんどが銅の消費量を超えます。250kW、315kWの漂遊損失は銅損、鉄損を上回り、熱損失の第一要因となります。
4極モータ(線図省略)。110kWを超えると銅損よりも鉄損が大きくなり、250kWと315kWでは浮遊損が銅損や鉄損を上回り、熱損失の第一要因となります。このシリーズの 2 ~ 6 極モーターの銅消費量とアルミニウム消費量の合計では、小型モーターは総熱損失の約 65% ~ 84% を占めますが、大型モーターは 35% ~ 50% に減少します。消費量はその逆で、小型モーターは総熱損失の約 65% ~ 84% を占めます。総熱損失は 10% ~ 25% ですが、大型モーターでは約 26% ~ 38% に増加します。漂遊損失は、小型モーターでは約 6% ~ 15% ですが、大型モーターでは 21% ~ 35% に増加します。電力が十分に大きい場合、鉄損浮遊損失が銅損を上回ります。場合によっては漂遊損失が銅損や鉄損を上回り、熱損失の第一要因となります。
1.2 R シリーズ 2 極モーター、浮遊損失の測定
試験結果より、総熱損失PQに対する銅損、鉄損、浮遊損失等の割合を求めます。図 2 は、モータ出力と浮遊銅損の比例変化を示しています。図の縦軸は全熱損失に対する漂遊銅損の割合(%)、横軸はモータ出力(kW)、菱形破線は銅損率、四角破線は浮遊損失の比率。図 2 は、一般にモーター出力が大きくなるほど、総熱損失に対する漂遊損失の割合が大きくなり、増加傾向にあることを明確に示しています。図 2 は、150kW を超えるサイズでは浮遊損失が銅損を超えることも示しています。モーターにはいくつかのサイズがあり、浮遊損失は銅損の1.5~1.7倍もあります。
このシリーズの 2 極モーターの出力範囲は 22kW ~ 450kW です。測定された浮遊損失の PQ に対する比率は 20% 未満から 40% 近くまで増加しており、その変化範囲は非常に大きくなっています。測定された浮遊損失の定格出力電力に対する比率で表すと、約(1.1~1.3)%になります。測定された浮遊損失の入力電力に対する比率で表すと、約(1.0~1.2)%ですが、後者2つは式の比率があまり変化せず、浮遊損失の比例変化が見えにくいです。 PQに負け。したがって、加熱損失、特に PQ に対する漂遊損失の比率を観察すると、加熱損失の変化の法則をよりよく理解できます。
上記 2 つの場合の浮遊損失の測定値は、米国の IEEE 112B 方式を採用しています。
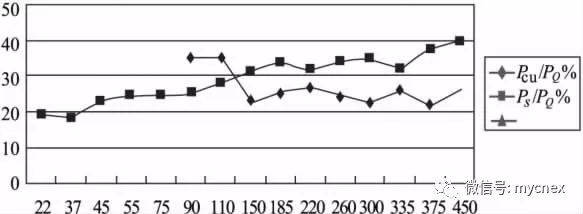
図 2. R シリーズ 2 極モータの総発熱損失に対する銅浮遊損失の比率の折れ線グラフ
1.3 Y2シリーズモーター
技術条件では浮遊損失は入力電力の 0.5% と規定されており、GB/T1032-2005 では浮遊損失の推奨値が規定されています。ここで方法 1 を採用します。式は Ps=(0.025-0.005×lg(PN))×P1 です。式 PN- は定格電力です。P1- は入力電力です。
漂遊損失の測定値が推奨値と等しいと仮定して電磁計算を再計算し、銅消費量、アルミニウム消費量、鉄消費量の4つの加熱損失の合計加熱損失PQに占める割合を求めます。 。比率の変更も上記のルールに沿ったものとなります。
つまり、電力が小から大に変化すると、銅の消費量とアルミニウムの消費量の割合は一般に大から小へと減少し、減少傾向を示します。一方、鉄損や漂遊損の割合は一般に小さいものから大きいものへと増加し、増加傾向を示します。2極、4極、6極に関わらず、一定の電力以上であれば鉄損が銅損を上回りますので、一定の電力を超えると鉄損が銅損を上回ります。漂遊損失の割合も小さいものから大きいものへと増加し、徐々に銅損に近づくか、銅損を超えることもあります。2 極で 110kW 以上の浮遊損失が熱損失の最初の要因となります。
図 3 は、Y2 シリーズ 4 極モータの 4 つの熱損失と PQ の比を示す折れ線グラフです (浮遊損失の測定値が上記の推奨値と等しいと仮定し、その他の損失はその値に従って計算されます)。 。縦軸は各種加熱損失のPQに対する割合(%)、横軸はモータ出力(kW)です。明らかに、90kW を超える鉄の漂遊損失は銅損よりも大きくなります。
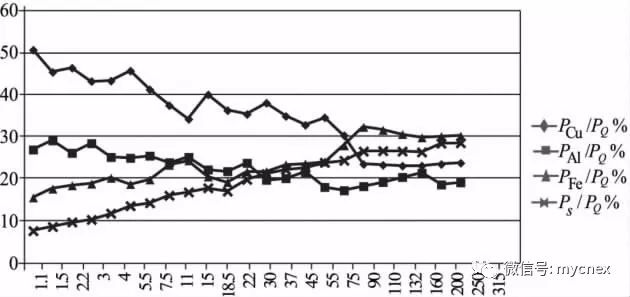
図 3. Y2 シリーズ 4 極モーターの総熱損失に対する銅消費量、アルミニウム消費量、鉄消費量、浮遊損失の比率を示す破線グラフ
1.4 文献では、総損失(風摩擦を含む)に対するさまざまな損失の比率が研究されています。
小型モーターでは銅の消費量とアルミの消費量が全体の損失の60~70%を占め、容量が増加すると30~40%に低下するのに対し、鉄の消費量はその逆であることが分かりました。%その上。漂遊損失については、小型モーターでは全損失の約 5% ~ 10% を占めますが、大型モーターでは 15% 以上を占めます。明らかになった法則は同様で、電力が小さい状態から大きい状態に変化すると、銅損とアルミニウム損の割合は一般に大から小に減少し、減少傾向を示しますが、鉄損と漂遊損の割合は一般に大から増加します。小規模から大規模まで増加傾向を示しています。。
1.5 GB/T1032-2005 方法 1 に基づく漂遊損失の推奨値の計算式
分子は測定された漂遊損失値です。モータ出力が小さいものから大きいものまで、入力電力に対する漂遊損失の割合は変化し、徐々に減少し、その変化範囲は2.5%~1.1%程度と小さくありません。分母を全損失ΣP、つまりPs/ΣP=Ps/P1/(1-η)に置き換えると、モータ効率が0.667~0.967の場合、(1-η)の逆数は3~となります。 30、つまり測定された不純物 入力電力の比と比較すると、全損失に対する散逸損失の比は 3 ~ 30 倍に増幅されます。パワーが高いほど、破線の立ち上がりが速くなります。当然、全熱損失に対する漂遊損失の割合をとれば、「倍率」の方が大きくなります。上記の例の R シリーズ 2 極 450kW モータの場合、入力電力に対する漂遊損失の比 Ps/P1 は、上記で推奨される計算値よりわずかに小さく、全損失 ΣP および合計熱損失に対する漂遊損失の比PQはそれぞれ32.8%です。39.5%、入力電力P1の比と比較して、それぞれ約28倍、約34倍に「増幅」されます。
本稿での観察・解析方法は、総熱損失 PQ に対する 4 種類の熱損失の割合を取ることです。比率の値が大きく、電力の小さいものから大きいもの、銅の消費量、アルミニウムの消費量など、さまざまな損失の割合と変化の法則がはっきりとわかります。全体的に割合は大きいほうから小さいほうへ変化し、下降傾向を示しています。鉄損と漂遊損の割合は全体的に小さいものから大きいものへと推移し、増加傾向にあります。特に、モータ出力が大きくなるほど、PQ における漂遊損失の割合が増加し、徐々に銅損に近づき、銅損を超え、熱損失の第一要因となることが観察されました。漂流損失。入力電力に対する漂遊損失の比率と比較すると、測定された漂遊損失と総熱損失の比率は別の方法で表現されるだけであり、その物理的性質は変わりません。
2. 対策
上記の法則を知ることは、モーターの合理的な設計と製造に役立ちます。モーターのパワーも違いますし、温度上昇や熱損失を抑える対策も異なり、重点も異なります。
2.1 低電力モーターの場合、銅の消費量が総熱損失の高い割合を占めます
したがって、温度上昇を抑えるには、まずワイヤの断面積を増やす、スロットあたりの導体の数を減らす、固定子のスロット形状を増やす、鉄心を長くするなど、銅の消費量を減らす必要があります。工場では、熱負荷 AJ を制御することで温度上昇を制御することがよくありますが、これは小型モーターにとってはまったく正しいことです。AJ を制御することは、本質的には銅損を制御することです。モータ全体のステータ銅損は、AJ、ステータの内径、コイルの半巻き長さ、銅線の抵抗率から求めることは難しくありません。
2.2 電力が小さい状態から大きい状態に変化すると、鉄損は徐々に銅損に近づく
鉄の消費量が100kWを超えると、一般に銅の消費量を上回ります。したがって、大型モータでは鉄の消費量の削減に注意する必要があります。具体的な対策としては、低損失の珪素鋼板を使用すること、ステータの磁密度を高くしすぎないこと、各部品の磁密度の適度な分布に注意することなどが考えられます。
一部の工場では、一部の高出力モーターを再設計し、ステーターのスロット形状を適切に縮小しています。磁力密度分布が合理的で、銅損と鉄損の比率が適切に調整されています。固定子電流密度が増加すると熱負荷が増加し、銅損が増加しますが、固定子磁束密度が減少し、銅損の増加よりも鉄損の減少が大きくなります。性能はオリジナル設計と同等で、温度上昇が低減されるだけでなく、ステーターに使用される銅の量も節約されます。
2.3 浮遊損失を低減するには
この記事では次のことを強調しています。モーターの出力が大きくなるほど、浮遊損失の低減にさらに注意を払う必要があります。「漂遊損失は銅損よりもはるかに小さい」という意見は小型モータにのみ当てはまります。上記の観察と分析によれば、明らかに、出力が高くなるほど、適切ではなくなります。「漂遊損失は鉄損に比べてはるかに小さい」という見方も不適切です。
入力電力に対する浮遊損失の測定値の割合は、小型モータの方が高く、電力が大きくなるほど低くなりますが、小型モータは漂遊損失の低減に注意を払う必要があり、大型モータは浮遊損失の低減に注意を払う必要があると結論付けることはできません。浮遊損失を減らす必要はありません。損失。逆に、上記の例と分析によれば、モーター出力が大きくなるほど、熱損失全体に占める浮遊損失の割合が大きくなり、浮遊損失や鉄損は銅損に近いか銅損を超えるため、より大きくなります。モーターの出力が大きいほど、それに注意を払う必要があります。漂遊損失を削減します。
2.4 浮遊損失を低減するための対策
浮遊損失はエアギャップの二乗にほぼ反比例するため、エアギャップを増やすなど、浮遊損失を減らす方法。正弦波(低高調波)巻線を使用するなど、高調波磁気ポテンシャルを低減します。適切なスロットフィット。コギングを減らす、ローターはクローズドスロットを採用し、高電圧モーターのオープンスロットは磁気スロットウェッジを採用しています。鋳造アルミローターシェル処理により横流を低減等。上記の対策では通常、有効な材料を追加する必要がないことは注目に値します。雑消費量は、巻線の放熱が良好であること、モータの内部温度が低いこと、雑消費量が少ないことなど、モータの加熱状態にも関係します。
例: 工場では 6 極、250kW のモーターを修理しています。修理テスト後、定格負荷の 75% で温度上昇は 125K に達しました。次に、エアギャップが元のサイズの 1.3 倍に機械加工されます。定格負荷でのテストでは、温度上昇は実際に 81K まで低下しました。これは、エアギャップが増加し、浮遊損失が大幅に減少したことを十分に示しています。高調波磁気ポテンシャルは漂遊損失の重要な要素です。中容量および大容量のモーターは、高調波磁気ポテンシャルを低減するために正弦波巻線を使用しており、その効果は多くの場合非常に優れています。適切に設計された正弦波巻線が中出力および高出力モーターに使用されます。高調波の振幅と振幅が元の設計と比較して45%から55%減少すると、漂遊損失は32%から55%減少し、そうでなければ温度上昇が減少し、効率が向上します。、騒音が減少し、銅と鉄を節約できます。
3. 結論
3.1 三相交流モーター
電力が小から大に変化すると、総熱損失に占める銅消費量とアルミニウム消費量の割合は一般に大から小へ増加し、鉄消費浮遊損失の割合は一般に小から大へ増加します。小型モーターの場合、銅損が総熱損失の最も高い割合を占めます。モータ容量が大きくなると、浮遊損失や鉄損が銅損に近づき、銅損を上回ります。
3.2 熱損失を減らすには
モーターのパワーも違いますし、対策の重点も異なります。小型モーターの場合、まず銅の消費量を削減する必要があります。中出力および高出力モータの場合は、鉄損と漂遊損失の低減にさらに注意を払う必要があります。「漂遊損失は銅損や鉄損に比べてはるかに小さい」という見方は一面的です。
3.3 大型モーターの総熱損失に占める漂遊損失の割合はより高い
この文書では、モーターの出力が大きくなるほど、漂遊損失の低減に一層の注意を払う必要があることを強調しています。
投稿時間: 2022 年 7 月 1 日