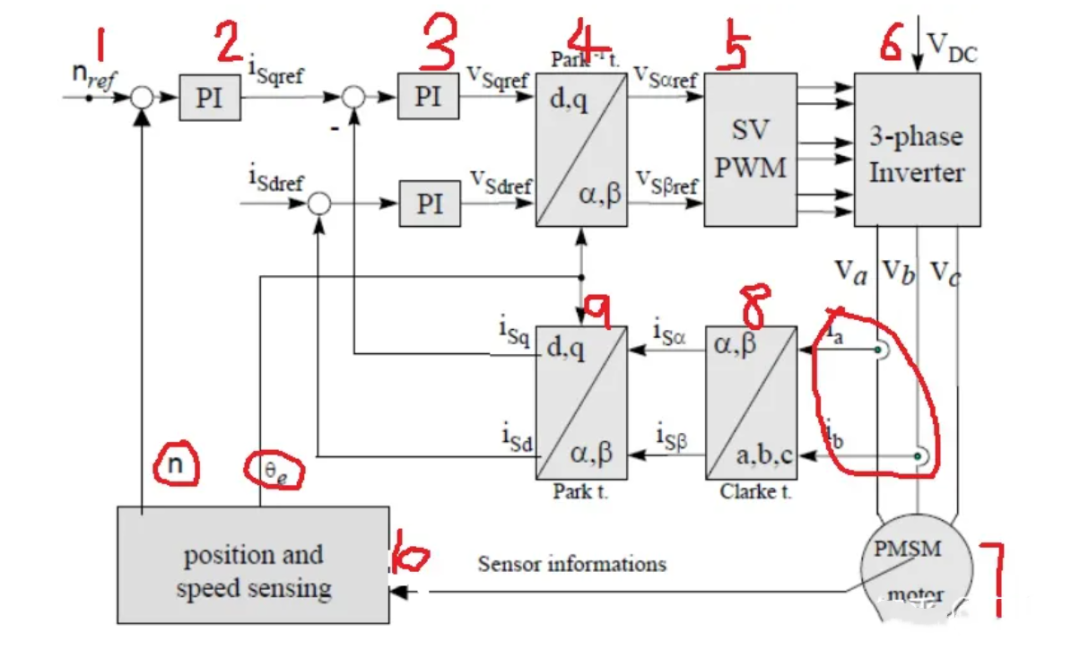
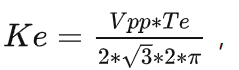
モーターを手に入れたとき、それを制御したい場合は、その基本パラメーターを知る必要があります。これらの基本パラメータは、下図の 2、3、6、10 で使用されます。これらのパラメータが使用される理由については、式を引くときに詳しく説明します。私は公式が一番嫌いだと言わざるを得ませんが、公式なしではやっていけません。今回取り上げるのはモーターのスター結線方式です。 Rs相抵抗 このパラメータの測定は比較的簡単です。手持ちのマルチメーターを使用して任意の 2 相間の抵抗を測定し、それを 2 で割ってモーターの相抵抗 Rs を求めます。 極対の数 n この測定には、電流制限付きの安定化電源が必要です。手元のモーターの三相配線の任意の二相に電源を投入します。制限する必要がある電流は 1A、通過させる必要がある電圧は V=1*Rs (上記で測定したパラメータ) です。次にローターを手で回すと抵抗を感じます。抵抗が明らかでない場合は、回転抵抗が明らかになるまで電圧を上げ続けます。モーターが 1 回転するとき、ローターの安定位置の数はモーターの極対の数になります。 Ls ステータ インダクタンス これには、ブリッジを使用して固定子の任意の 2 つの相間のインダクタンスをテストする必要があり、得られた値を 2 で割って Ls を取得します。 逆起電力ケ FOC 制御プログラムの場合、モーターに関連するこれらのいくつかのパラメーターで十分です。Matlab シミュレーションが必要な場合は、モーターの逆起電力も必要です。このパラメータの測定は少し面倒です。次の図に示すように、モーターを n 回転で安定させ、モーターの回転が安定した後にオシロスコープを使用して 3 相の電圧を測定する必要があります。 上の式で、Vpp は波形の山と谷の間の電圧値です。 Te=60/(n*p)、n は機械速度単位 rpm、p は極対の数です。モーターが 1000 回転を維持する場合、n は 1000 に等しくなります。 現在、モーターパラメータ同定と呼ばれるアルゴリズムがあります。これは、モーターコントローラーにマルチメーターやブリッジのテスト機能を持たせるためのアルゴリズムを使用し、測定と計算を行うものです。パラメータの特定については、関連する式を参照して後で詳細に説明する。 投稿日時: 2023 年 3 月 28 日